嵌入式系统与无人飞行器应用(4)
来源:本站 发布日期:2015-04-252.系统整合
由於航电系统的架构必须涵盖以上所介绍的许多模组系统,甚至在不同的任务需求当中还会加载特殊的仪器设备,然而在载具设计、组装完成后,其性能、特性都会因此有所限制。航程的长短、巡航的时间、额外负载的大小都会影响其实用性。
文章前面提过,飞机上所有系统皆需要电力来源,机载电池是最直接的方式,但重量也就随着电池数量的增加而增加,目前有人尝试在无人飞机表面铺设太阳能面板来做為电池充电的来源,但由於太阳能尚未有较高转换效能之面板以及铺设面积通常不足的情况下,目前以引擎加掛发电机视為一个较可行的方式,既能减少电池的数量,也可提供一个稳定的电源供应方式。
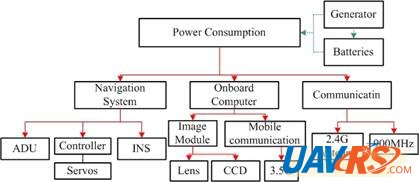
图7 电力规划
机载航电系统部分,為了任务及控制需求,通常会以工业电脑做為主要嵌入式系统核心,搭配单晶片系统相互结合辅助,从高阶到低阶的不同介面分工,以期顺利达成任务需求。当系统趋於复杂时,则必须仔细注意干扰问题的產生,在狭小的空间内,电子电路元件所发射出的频率以及其功率大小是否会影响其他系统的运作,每个子系统间的屏蔽,电源、讯号佈线的选择,皆是这种高自主性载具在设计时要详加注意的部分。若在巡航过程中產生失控的现象,可能会导致任务失败和地面人员的损伤,故必须详加考量系统的强健性、抗干扰性,才可负担来自各界的任务要求。
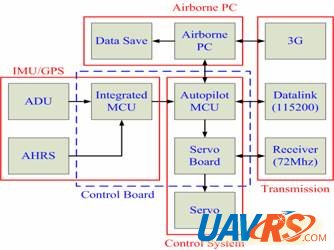
图8 机载航电系统架构图
3.实际应用
在本文特别商请国立成功大学航太所林清一教授研究团队目前所发展的长程高负载UAV–Ce-71进行测试,此架UAV翼展為3.6公尺,搭配150CC引擎,最快时速150km/hr,全机身以玻璃纤维打造,总负载可达40公斤以上,搭配额外系统可提供灾区勘查、地面监控、通讯辅助等多功能性之飞行平台。
机载电脑硬体部分,使用台湾DMP公司自行研发的RB-100嵌入式系统电脑,採用记忆卡做為储存空间减少体积并避免震动的问题,可以安装Windows XP、Linux等作业系统,它除了是一台电脑外,更提供了完整的周边通讯介面AD转换、SPI/I2C、USB、COM等,可以与许多感测器直接连结;更有多组PWM可以直接控制伺服马达。开发环境可以支援VB.net、C 等高阶程式语言加快发展脚步。
内部程式採用Windows XP Embedded為作业系统核心,此系统优点在於将XP模组化,分成1万多个零件,只需要选择符合应用程式需求的功能元件,可使系统所需空间减少、开机速度快,却又能保持XP原有的稳定性,只要XP能支援的驱动程式,皆可在XP Embedded中直接使用不需额外编写另外的驱动程式。
当建立好XPE的系统程式之后,即可开始应用程式的开发,XPE对於相同是微软所出的Visual Studio有完全的相容能力,只需要将所属的元件在环境编译时载入,并加上.net framework的相关版本,便可完成整个系统的开发,初期建议使用XPE的基本介面 – Explorer shell,方便进行除错、稳定性等测试,待所有功能确认完成后,可使用Customer shell客製化介面来减少不必要的系统浪费,加快系统速度,甚至可以有HORM - Hibernate Once Resume Many的快速啟动功能。
本次测试為开发VB.net程式的机载系统接收相关GPS、AHRS等讯息资料,并定时将讯息经由行动通讯网路下传至地面站,即时显示位置於图资上,地面站规划好航路并设定目标航点后,可上传至UAV。
图11 机载端程式系统
图12 实际飞行测试
使用RoBoard提供了小功率、小体积的优点,并且可使用高阶程式语言进行开发节省研究时程,机版上并直接有许多通讯介面可供使用,包含伺服马达的控制,省去控制讯号转接版的需要。如何增进其系统可靠度,提升意外事件处理的能力,这是不管使用何种系统的工程师及研发人员都必须详加规划的。UAV的飞行速度非常快,机上所承载的设备也都相当昂贵甚至稀有,任何一次意外的发生都是不被允许的,唯有高可靠度系统、稳定的硬体、準备完善的备援机构,才能让UAV的功能发挥到最大。
七、未来展望
聊了这麼多大大小小关於UAV的一切,从最先进的到我们台湾自主研发的,在在显示无人飞行载具的发展,至今已趋於成熟,已经慢慢从技术面的研发转移到应用面的探讨。在台湾也有环境勘查等计画採用UAV来进行,如何继续的提高UAV与地面相关人员的协同性,加强彼此之间的连结,甚至能做到载具自主起飞与降落,其中相关技术有待各领域中的先进前辈开发探索,当UAV的功能逐渐增加,系统更加稳定时,被採用的机会才会越来越大,让UAV產业能够蓬勃发展。
八、结论
全世界各地不论是军用或是商用的无人飞行载具皆已经发展至一个成熟的阶段,如何让它更有竞争性、更有功能性,考验着每个研发人员的智慧。依据任务需求的不同,UAV的发展也会慢慢趋向於功能性的考量,滞空时间的长短、负载的大小限制、起飞距离的长短、飞行高度的要求,每项都是一个重要的课题,如何达成目标是工程师与研发人员要一起努力的方向,这样高度整合性的系统,各个子系统也都会持续发展与精进,在时间的推演下,UAV将会有更多的应用出现,值得持续去注意这个潜在的市场。但是相较於国外的发展,台湾有能力也有机会在此领域中立足一片天,甚至切入相关的系统模组发展,有目标才会有前进的动力、有竞争才会有成长的机会,嵌入式系统体积小、成本低等优点,成為了许多系统当中的重要核心之一,系统选择的主要依据在於处理核心的速度、介面IO的多寡、电力消耗等,此次利用DMP所生產的RoBoard(RB-100)做為UAV机载电脑的部分,由於它支援包含XP Embedded、Linux、DOS等作业系统,最好的优点又有伺服马达与通讯介面的脚位支援,可以利用函式库直接进行控制,省去另一块控制板的需求,此外也有类比讯号擷取的脚位,眾多的功能皆能在一块体积非常小的板子上一次满足,电力的消耗也非常少,狠适合在无人载具上配置,也许当作主要控制核心;或者搭配其他系统,成為一个资料汇整中心。RoBoard的发展也是台湾厂商的精心之作,除了本篇介绍用於UAV之外,也将介绍应用在其他种类的无人载具上,利用其优点,完成另一个任务。
图4 VTOL UAV(垂直起降无人机)
(图片取自於http://cgvi.uscg.mil/media/main.php?g2_itemId=107488,所有权归原作者所有)
除了以上几种较大型的UAV外,也有為了方便携带及操作,可以由单人背负的小型UAV,主要负责小区域的侦察和搜索任务,包括海岸搜索、反恐、安全警戒等,由於运用弹性和机动性极佳,适合小型单位使用。
看了那麼多军事用途的UAV后,其实主要关注的应该是在商用或民用领域上有甚麼值得UAV投入,并且积极拓展应用的方向,这些应用才是UAV能够真正普及化的重要领头羊。
民用领域上的发展,主要的推广来自於民间的公司以及研究机构的需求,促进UAV產业在民用及商用的扩展,以下列举出几个相关有潜力的发展提供有意加入这个展业的公司或组织参考:
1.边界巡逻及监视
2.国土安全
3.国土绘製、电子地图製作
4.救灾协助与支援
5.搜索及搜救
6.区域通讯及广播系统支援辅助
7.ATC(Air Traffic Control)支援辅助
8.地面交通监控
9.电力传输线巡察
10.环境研究及空气品质监测
叁、飞机运动原理
飞机在整个任务过程中,会持续受到4个力的影响,这些力量的掌控是性能表现的重要关键之一。第一个是最常见的由於万有引力所造成的重力,会让任何物体在空中呈现往下掉的趋势;第二的力则是使用不同的翼型来提供飞机一个向上爬的升力,不过这个力必须是在有速度的情况下才会存在进而提供给飞机本身;第叁个力的產生是因為每台飞机的构型不同,所造成的阻力,而这个力的大小却也跟速度成正比,这就是為什麼大部分追求速度的飞机都会设计成低阻力的原因,这样才能在高速的情况下得到最大的升力与最低的阻力;最后一个要介绍的大大影响飞行载具的性能,这个力便是推力,它的性能优劣结合上述的几个力直接影响飞机飞行时的动态表现,有些飞行载具搭配不同的发动机,所呈现出来的可以是完全脱胎换骨的能力提升。















 关注中科遥数官方微信
了解更多资讯
关注中科遥数官方微信
了解更多资讯